
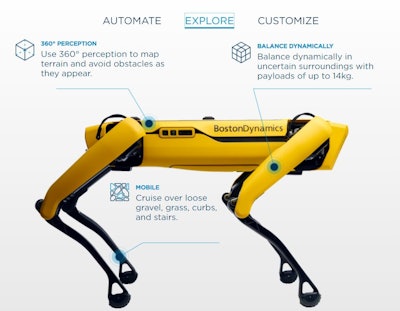
Agile mobile robots like Boston Dynamics' Spot can collect limitless quantities of site data, improving existing analysis tools and enabling teams to focus on action rather than observation.
In Spot’s first year on the market, Boston Dynamics reports it has seen diverse teams in an array of industries put the robot to use. During this time, the company worked closely with hundreds of Spot users to understand their application development workflow: how they attach sensors, analyze data, and integrate the robot into their existing systems. Common obstacles were identified and mapped out an easier path to implementation.
Spot Release 2.1 acts on those insights and makes it easy to attach sensors, collect and save data and integrate that data into existing systems. With 2.1, there are several features that make Spot immediately useful out of the box for autonomous data collection missions. These can be used by operations teams to repeatedly collect vital data in dangerous or remote sites.
Sensor Integration
Attaching new image sensors, like off-the-shelf spherical or thermal cameras, is now as simple as editing an example script and installing its docker container onto the Spot CORE compute payload. The new image sources show up on Spot’s tablet controller, and users can trigger captures in both teloperation and the easy-to-use Autowalk autonomy system. Spot can now be used to collect training images for computer vision models, to visualize data and model output live on the tablet controller, and to capture data from custom non-visual sensors like gas detectors or laser scanners.
Comprehensive Data
Spot now has the ability to attach metadata to images, associating them with the robot’s location, user-defined labels, or custom values such as GPS coordinates from an attached payload. This enables users to put their data in context, for example: combining site photos from multiple missions into a single view, sorting images by asset-ID, or collecting datasets for computer vision model training.
Updated Workflows
The data collection workflow has been significantly streamlined. Users can capture data manually and autonomously in Autowalk and download it to the tablet’s SD card for easy off-robot use. Common actions and callbacks can be configured on the tablet for quick use during operation. We’ve also made numerous under-the-hood improvements to Spot’s industry-leading locomotion and autonomy, further enabling operators to focus on the job and not the robot.
Summary of New Features
Improved data collection:
- Capture images from robot cameras, Spot CAM, and third-party image sources, tag them with metadata and download them to the tablet for easy viewing and sharing.
- When recording Autowalk missions on the tablet, point Spot at items of interest and view image data in real-time.
- Annotate image data with robot position or custom metadata from easy-to-write data acquisition (DAQ) plugins.
- Export data in standard types for easy importation into off-the-shelf analysis tools.
Enhanced robot behaviors:
- Improved obstacle avoidance, slip handling and recovery, stairs performance, self-righting on sloped terrain and near obstacles, crawl stability, and stability standing up with payloads and on sloped terrain.
- New roll-over behavior for easier access to the battery compartment.
- Improved fiducial position measurements and multi-fiducial support in GraphNav maps.
Software improvements:
- Remote desktop support via TigerVNC.
- Cockpit provides a graphical system administration interface.
- Docker and Portainer enable deployment and management of Docker containers as components using a simple web UI.
- Pre-configured network settings provide better support for WiFi dongles.
Log access:
- To assist with debugging, application developers using Spot can now access some logs stored on the robot, including:
- Logs of API requests and response messages.
- Text log messages and binary data.
- Developers can now contribute their own data to the on-robot log.
System administration:
- Spot now collects logs from batteries, clears them, and includes battery log data in the system log bundle.
- Admin Console now provides a UI for rebalancing an imbalanced battery.
- Spot can now associate with 802.1x enterprise WiFi networks, including those which require certificates.
These new features in Release 2.1 unlock Spot’s full data collection potential and set the stage for new capabilities coming early next year: self-charging and remote operation.



















